

|
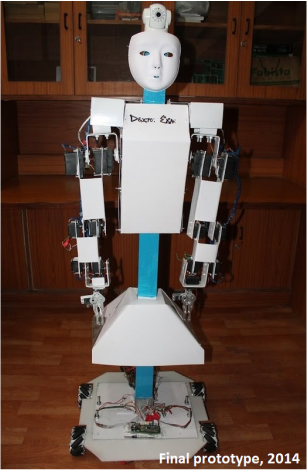
Dexto: Eka: is a tele-operated anthropomorphic robot which is approximately 5' 1" tall. It is also India's first tele-operated humanoid and the tallest. . The project was begun with the goal of achieving tele-presence while maintaining low developmental costs. "Dexto" is derived from the word dexterous and "Eka" is the Sanskrit word for one. The project was started with the intention of creating a fully autonomous/tele-operated robot that can be deployed real time in the span of a few years. The project comprises a series of robots each one improving upon its predecessor. The intent behind the project was to save lives. These robots can be controlled from anywhere in the world. In accident-prone industrial areas, these low-cost tele- operated robots can be deployed and in case of unpredictable disasters, any harm would befall the robot rather than precious human life.
Dexto: Eka: is a tele-operated anthropomorphic robot with three modes of operation: dependent, semi-sovereign and sovereign. In the dependent mode, the tele-operator has complete control over the robot. In the semi-sovereign mode, the tele-operator has partial control but the robot is able to make decisions of its own should a situation prove detrimental to its well-being. In the sovereign mode, the robot has complete autonomy over its actions. |
|
Dexto: Eka: has robotic arms of 6 Degrees of freedom each and an omnidirectional mecanum wheel drive. The mecanum wheel drive is quite unique as it provides motion with no directional restraint and can easily navigate congested spaces. Such a system combining 12 DOF arms and a mecanum wheel drive is unique to Dexto: Eka:. The communication between the robot and the tele-operator takes place via a Wi-Fi channel. The user is able to see the environment the robot is in via a live feed provided by an IP Camera mounted on the robot.
The tele-operator governs the robot through a human-machine interface which includes Graphical User Interface (GUI), an exo-frame and a control column. The exo-frame enables control of robotic arm in slave mode, whereas the control column aids in manoeuvring the movement of robot. The robot is able to mimic the motions of the tele-operator with great accuracy. Every joint of the robotic arms can be controlled using the wearable exo-frame. The GUI besides monitoring the robot can also act as an alternative to the exo-frame and control column. The robot can be completely controlled from anywhere in the world using the software that has been developed for it. |
|
SPECIFICATIONS
HEIGHT 5' 1''
WEIGHT 20kg
ACTUATOR Servomotors
CONTROL UNIT Master Processing Unit
SENSORS Ultrasonic Sensors and Infra-red array sensors
POWER Rechargeable Lithium Ion Batteries
WEIGHT 20kg
ACTUATOR Servomotors
CONTROL UNIT Master Processing Unit
SENSORS Ultrasonic Sensors and Infra-red array sensors
POWER Rechargeable Lithium Ion Batteries
DEGREES OF FREEDOM
HEAD Up/Down, Left/Right 2 DOF
LEFT ARM Shoulder joints (Forward/Backward, Abduction) 2 DOF
Elbow joints (Forward/Backward) 1 DOF
Wrist joints (Up/Down) 1 DOF
Gripper (Open/Close, Circumduction) 2 DOF
RIGHT ARM Shoulder joints (Forward/Backward, Abduction) 2 DOF
Elbow joints (Forward/Backward) 1 DOF
Wrist joints (Up/Down) 1 DOF
Gripper (Open/Close, Circumduction) 2 DOF
LOCOMOTION DRIVE Omni Directional 3 DOF
TOTAL 17 DOF
LEFT ARM Shoulder joints (Forward/Backward, Abduction) 2 DOF
Elbow joints (Forward/Backward) 1 DOF
Wrist joints (Up/Down) 1 DOF
Gripper (Open/Close, Circumduction) 2 DOF
RIGHT ARM Shoulder joints (Forward/Backward, Abduction) 2 DOF
Elbow joints (Forward/Backward) 1 DOF
Wrist joints (Up/Down) 1 DOF
Gripper (Open/Close, Circumduction) 2 DOF
LOCOMOTION DRIVE Omni Directional 3 DOF
TOTAL 17 DOF
